A cansat that would scan the Earth's surface and then using ai it would reconstruct it in 3D
A cansat whose flight could be controlled and optionally it would scan the surface
A CanSat that would act as a rover after landing, take pictures and explore the
environment
A cansat that would have a controlled and safe landing
A cansat that would extend wings to achieve controlled flight
Outline of the approximate dates and things we need to do
Entry 2: Determining what our secondary mission will be
We chose to make a CanSat that will have a controlled flight using a ram-air parachute
Proof of concept that such a small device/satellite could be controlled using only two servos and
potentially one dc motor
Further brainstorming of design
Entry 3: Getting more accustomed with the CanSat requirements and deadlines
We found out that there is a minimum descending speed (5 m/s) which slightly altered our design
Discussion about picking parts, so that we meet the requirements for the first deadline
We will also need to consider the protocol we want to use:
ELRS
mLRS
WiFi
We will need these parts: receiver, transmitter, flight controller, computer for ground station
Entry 4: More specific identification of parts that we will use
Parts:
We determined that mLRS will be the ideal protocol for us since it meets all of our requirements
(long distance, telemetry, rx transmission), and it is also quite well documented
Receiver: Matek mR900-30 mLRS 868MHz RX
Transmitter: Matek mR900-30-TX mLRS 868MHz TX Kit
We also determined that we will use the raspberry pi 4 as the ground station:
Has the necessary computational power for our use case
Has the pins that will be required to set up the transmission
We still need to choose a flight controller
Entry 5: Picking the SpeedyBee F405 Wing Mini
We chose the SpeedyBee F405 Wing Mini flight controller because:
It has a sufficient amount of output pins that will be necessary to control the servos
It already has some built in sensors that we will need to use
It has all of the needed connectors to connect our sensors (GPS, compass, temperature)
It is in stock in the Czech Republic
It is relatively compact
Ordering of parts:
We ordered: Matek mR900-30 mLRS 868MHz RX, Matek mR900-30-TX mLRS 868MHz TX Kit, SpeedyBee
F405 Wing Mini
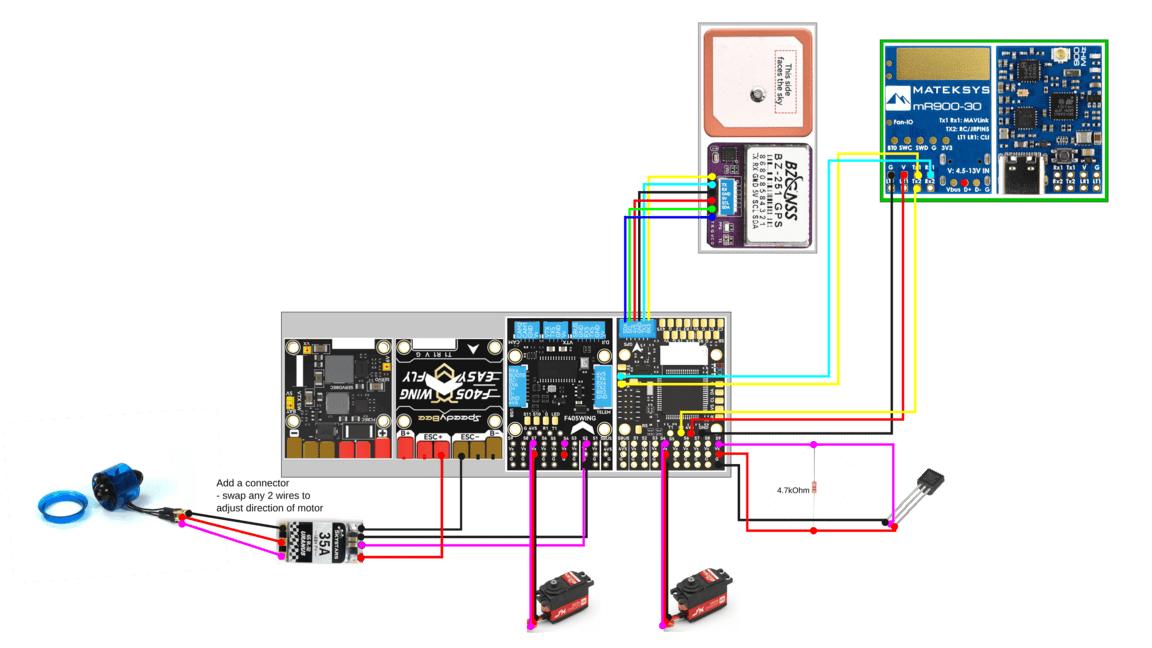
Entry 6: Sketching the wiring diagram to determine the requirements for the flight controller
Entry 7: First assembly of parts to check compatibility
Determining what antenna we will use on the ground station that meets these requirements:
Dipole antenna
Directional: Moxon
Operates within 900/868 MHz
Entry 8: Purchasing the antenna
We decided to go for a directional antenna. The specific model is Radiomaster Bandit Moxon
868/915MHz because of its reach and a relatively price.
Entry 9: Testing the reach of the connection
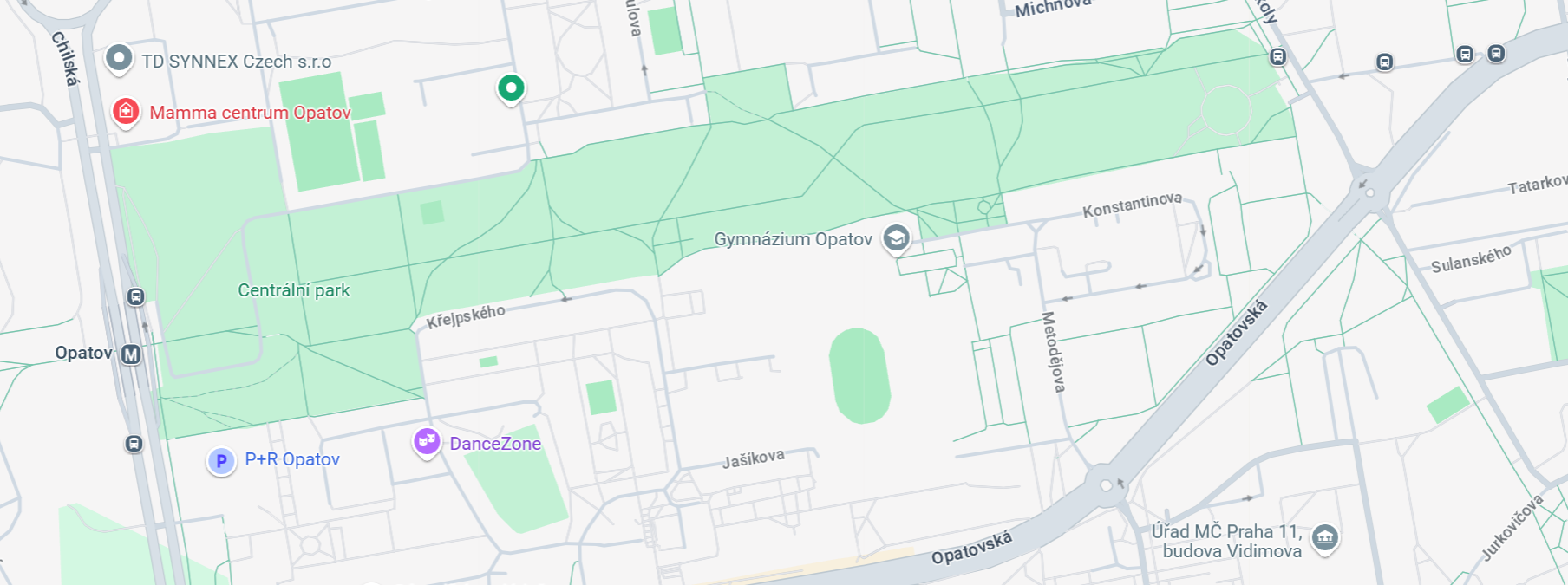
We decided to test in the Centrální Park near the Opatov station as it was a convenient location.
The connection was stable and reached a distance of about 1000m through obstructions. As it was too cold, our hands began to freeze and we had to halt testing.